目标与宗旨
本指南主要是为了提供ScaleLab研究方向相关的入门课程、资料和一些前沿讲座等等,希望每一个来到ScaleLab的新人都可以在这里打开自己的科研大门。
在这里你会从Know-what和Know-how开始学习基本的内容,逐步探索Know-why!
Spatial Cognition and Robotic Automative Learning Laboratory
本指南主要是为了提供ScaleLab研究方向相关的入门课程、资料和一些前沿讲座等等,希望每一个来到ScaleLab的新人都可以在这里打开自己的科研大门。
在这里你会从Know-what和Know-how开始学习基本的内容,逐步探索Know-why!
ScaleLab实习生Goal Point
自学且门槛
合作课题的基础
按类别组织的学习资源和工具
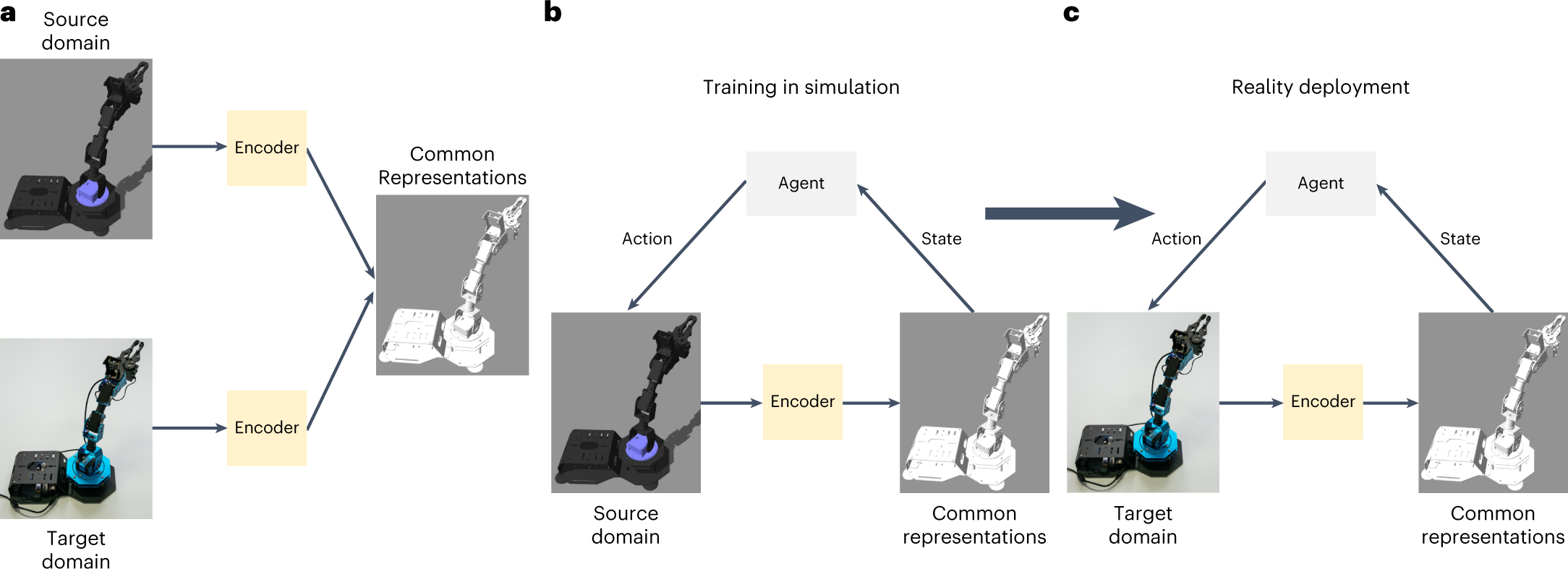
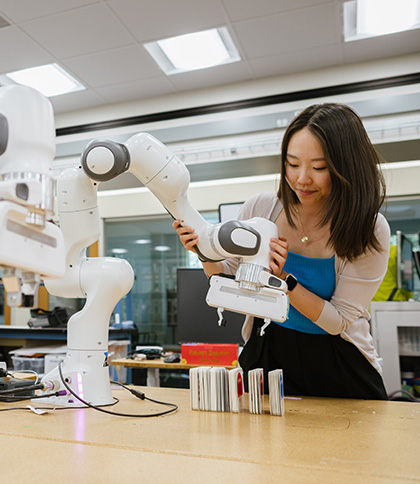
致力于具身智能和机器人技术研究
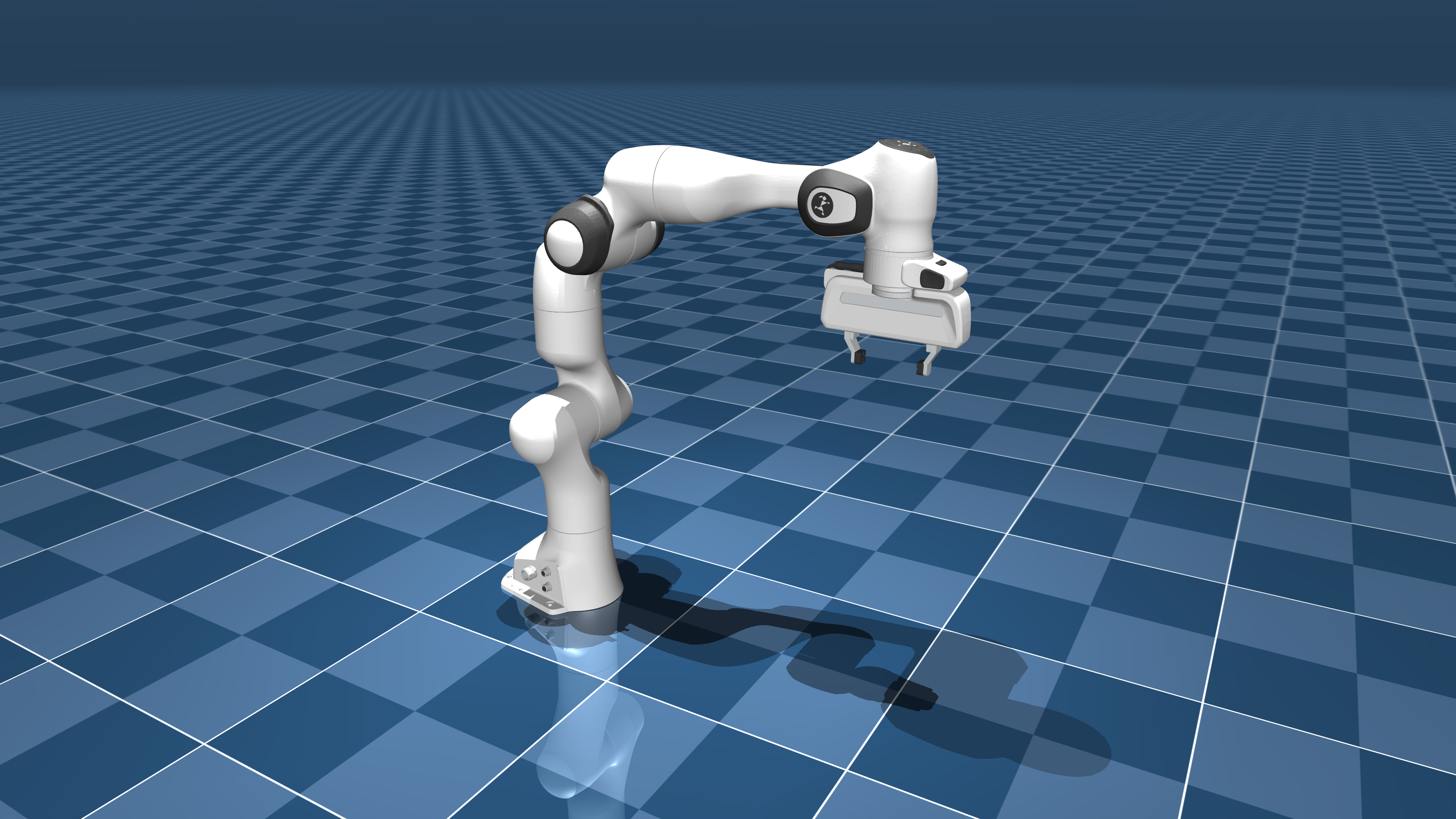
ScaleLab是一个专注于具身智能、机器人技术和人工智能研究的实验室。我们致力于推动机器人在复杂环境中的感知、认知和控制能力的发展。
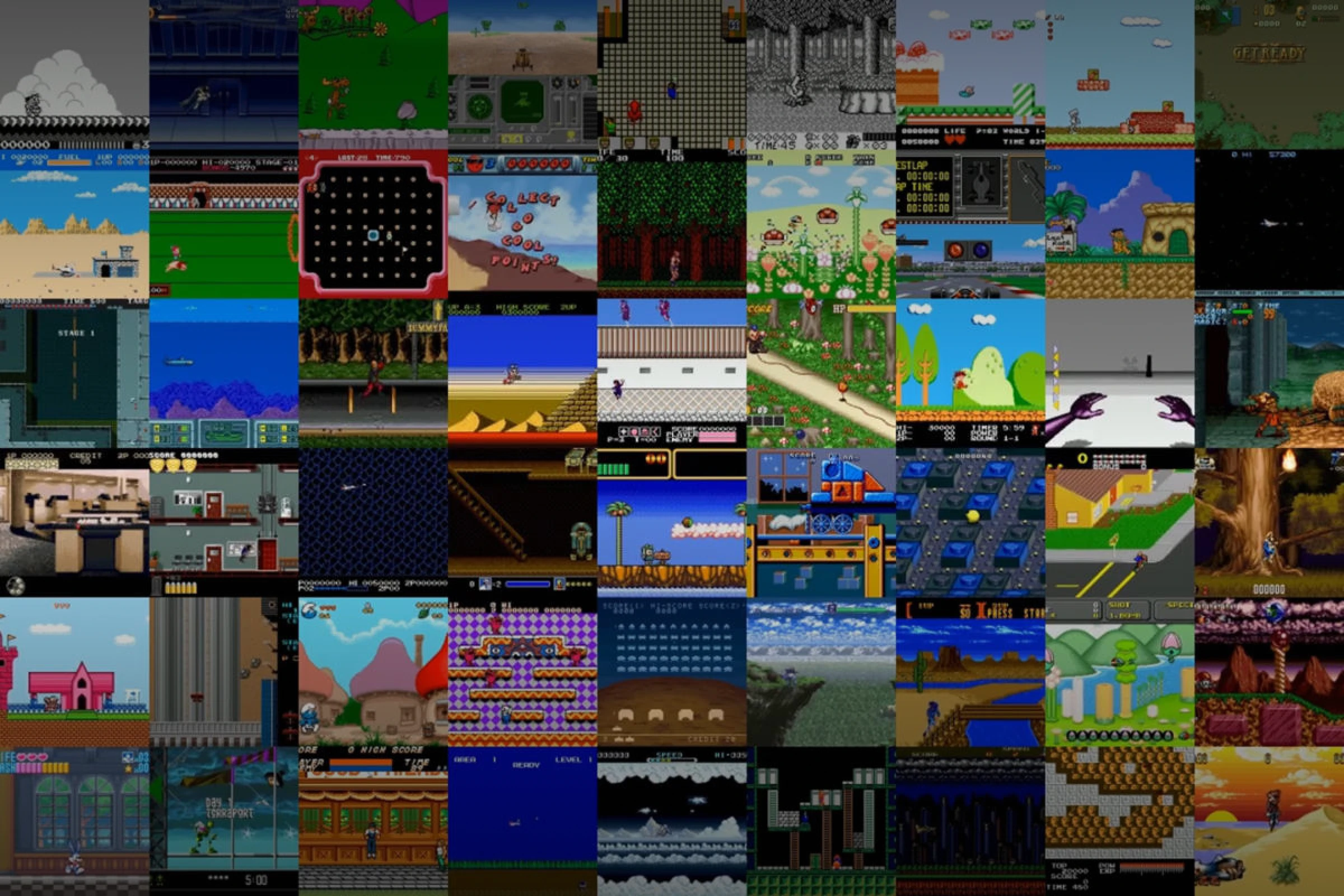
实验室的研究方向包括计算机视觉、机器学习、强化学习、物理仿真等多个领域,为学生提供全面的科研训练和学习机会。
如果你对ScaleLab的研究方向感兴趣,欢迎联系我们了解更多信息。完成Stage0的要求后,可以联系老师分配具体的研究课题。